Regulované pohony s měniči frekvence (2. část) |
 |
 |
| Napsal uživatel Ing. Naděžda Pavelková, produktová a marketingová manažerka, ABB s.r.o. |
| Čtvrtek, 14. červen 2012 |
|
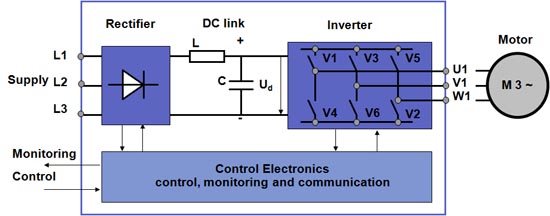
Jak pracuje měnič frekvenceČinnosti měniče frekvence nejlépe porozumíme z blokového schématu na Obr.8. Je zřejmé, že síťové napětí projde odrušovaním filtrem (EMC) a usměrní se. Usměrňovač v běžných aplikacích je diodový. Ve stejnosměrném meziobvodu se napětí filtruje tlumivkou a kondezátory a toto stejnosměrné napětí se přivede na vstup střídače který opět vytvoří střídavou trojfázovou síť, nyní však s proměnným napětím a frekvencí. Na výstup měniče frekvence je připojen asynchronní motor, jeho otáčky jsou přímo úměrné frekvenci. Vlastní střídač je v současné době osazován téměř výhradně spínacími tranzistory (IGBT). Regulační obvody zajišťují jednak vlastní činnost měniče, optimalizují práci motoru a mají rovněž dohlížecí funkci. V případě výrazné odchylky některých parametrů (např. napětí, proudu, teploty, aj.) vydají varování a v případě dalšího nebezpečného vývoje oznámí poruchu a měnič odstaví. Celé řízení je v současné době digitální a tedy vysoce spolehlivé. Aplikační programy je možno obvykle zvolit (přepnout) z několika možností, což u vyspělých výrobků umožňuje zvolit např. ovládání z více míst, využít PID regulátor pro regulaci, použít speciální software pro čerpadla a ventlitátory nebo třeba jeřáby, odstředivky apod. Ovládání frekvenčního měniče je možné z panelu, kde je obvykle k dipozici několikařádkový alfanumerický displej a několik málo tlačítek. Obvykle se však ovládání z panelu používá velmi zřídka a spíše se využívá buďto analogových a digitálních (tlačítkových) vstupů anebo u rozsáhlejších aplikací ovládání z nadřazeného řídicího systému po sběrnici (obvykle mezinárodní normované – Profibus, Modbus, aj.).
Obr.8 Princip měničů frekvence Z výše uvedeného popisu je tedy zřejmé, že zapojení frekvenčního měniče z hlediska uživatele je velmi jednoduché, neboť se prakticky připojí pouze napájecí síť, poháněný motor a několikažilový ovládací kabel (resp. kabely). Výkonové parametry a principy řízeníFrekvenční měniče se vyrábějí ve výkonovém rozsahu od několika set W až po cca 10 MW (Obr.9). Nejmenší jednotky bývá možno napájet i z jednofázové sítě 230 V, přičemž na výstupu je k dispozici síť 3 x 230 V proměnné frekvence, obvykle se však pro napájení používají standardní stítě 3 x 400 V, 3 x 500 V, 3 x 690 V se stavějí jednotky o výkonu až do 5,6 MW, výkony asi od 0,5 MW do 100 MW se realizují též vysokonapěťovými měniči - menší průřezy kabelů). Výstupní kmitočet může být až několik set Hz, obvykle se využívá jen rozsah 0 až 100 Hz, což umožňuje regulovat otáčky od 0 do 6000 ot/min s dvoupólovými motory.
Obr. 9 Sortiment měničů frekvence Z hlediska vnitřního řízení střídače se vyskytuje několik systémů, o kterých je třeba se zmínit. Nejjednodušší je skalární řízení, které v podstatě vytváří síť proměnného napětí a kmitočtu nezávisle na motoru, je založeno na řízení poměru U/f. Je proto dynamicky nejpomalejší, avšak pro jednoduché aplikace plně vyhovuje. Naopak velmi přesné a dynamické řízení je vektorové, které však obvykle vyžadovalo otáčkovou zpětnou vazbu (tachogeneríátor). V současné době byl vyvinut system řízení "sensorless vector control", které zapojení čidla otáček nevyžaduje. Jak pro skalární tak pro vektorové řízení je typický prvek modulátoru, který řídí spínání prvků střídače s pravidelnou spínací frekvencí.
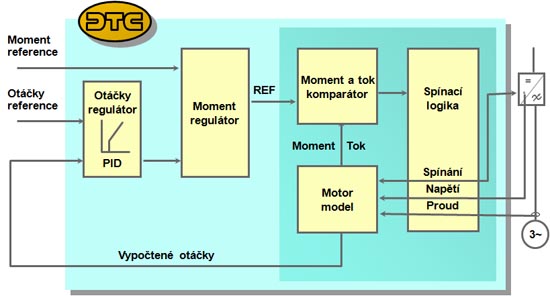
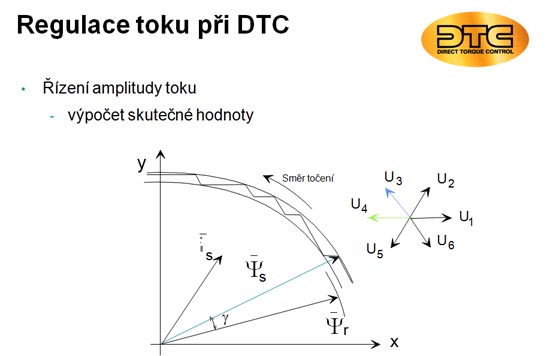
Obr. 10 Blokový diagram DTC moment a tok jsou udržovány v úzkém tolerančním pásmu V současné době je asi nejdokonalejší řízení tzv. přímé řízení momentu (DTC-Direct Torque control). Základní myšlenka DTC je naznačena na Obr. 10. Jádrem systému jsou hysterézní regulátory momentu a magnetického toku, které využívají optimalizovanou spínací logiku, odpadá tak prvek modulátoru. Velmi důležitou částí řízení je přesný model motoru. V něm se vypočítává skutečný moment, statorový magnetický tok a otáčky hřídele z proudu měřeného ve dvou fázích motoru a ze stejnosměrného napětí v meziobvodu. Tyto výpočty jsou během jedné sekundy uskutečněny 40 000 krát, takže DTC přesně ví, jak se chová hřídel motoru. Přesnost modelu motoru závisí na tzv. identifikačním běhu, který proběhne při uvádění pohonu do provozu. Hlavními parametry modelu motoru jsou indukčnosti a odpor statoru. Bere se v úvahu rovněž vliv magnetické indukce na velikost indukčností. Referenční hodnoty momentu a toku jsou porovnávány se skutečnými hodnotami a řídicí signály jsou generovány pomocí dvojúrovňové hysterézní logiky. V DTC není samostatný pulsně šířkový modulátor (PWM), který by řídil napětí a frekvenci. DTC je popisováno jako spínání „just in time", každé sepnutí je potřebné a využité. U klasické PWM bývá 30% sepnutí nevyužitých. Díky uvedeným vlastnostem DTC nabízí extrémně rychlou momentovou odezvu (pod 2 ms) a velmi rychlou reverzaci. Moment vykazuje značnou linearitu v celém rozsahu otáček včetně nulových. Přesnost otáček je velmi dobrá v celém otáčkovém rozsahu a to i bez nutnosti použít zpětnovazební čidlo otáček. Navíc při použití čidla otáček se pak pohon rovná pohonu stejnosměrnému (statická chyba otáček je 0,01%) a splňuje tak nejvyšší požadavky jak na dynamiku tak na přesnost. Dalšími přednostmi DTC je možnost překlenutí krátkodobých výpadků napájecího napětí, letmý start, potlačení momentových rázů, snížení hladiny hluku, optimalizace magnetického toku motoru, brzdění tokem, maximální moment je k dispozici i v nulových otáčkách.
Předchozí část článku:Regulované pohony s měniči frekvence (1. část) Pokračování:Regulované pohony s měniči frekvence (3. část) Regulované pohony s měniči frekvence (4. část) ABB s.r.o Sokolovská 84-86 |
 Pokračování článku regulované pohony s měniči frekivence. Jak pracuje měnič frekvence, výkonové parametry a principy řízení.
Pokračování článku regulované pohony s měniči frekivence. Jak pracuje měnič frekvence, výkonové parametry a principy řízení.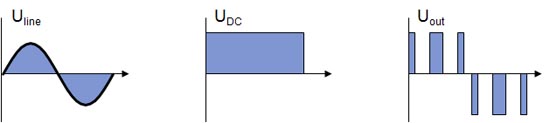

Články na podobné téma



Naše další portály:
![]()
- „Internet věcí“ pro techniky údržby aneb Proč sdílet data z měřicích přístrojů?
- Fluke Specials jsou branou pro pravidelné výhodnější nabídky
![]()
- Prestižní RedDot za barvy a design
- Čtečky čárových kódů – žádné kompromisy, když přijde na modularitu
- LED s vyzařovacím úhlem až 270°
![]()
- Panasonic nabízí svět virtuální reality
- Jednoduchá komunikace mezi řídící jednotkou a inteligentním senzorem
![]()