|
 Lineární motor pracuje na indukčním principu stejně jako klasický rotační servo motor rozvinutý do roviny. Díky tomuto uspořádání umožňuje přímočarý pohyb bez zprostředkujícího převodu mechanickým komponentem, kterým může být ozubený řemen, ozubený hřeben a nebo v současné době nejčastěji používaný kuličkový šroub. Lineární motor pracuje na indukčním principu stejně jako klasický rotační servo motor rozvinutý do roviny. Díky tomuto uspořádání umožňuje přímočarý pohyb bez zprostředkujícího převodu mechanickým komponentem, kterým může být ozubený řemen, ozubený hřeben a nebo v současné době nejčastěji používaný kuličkový šroub.
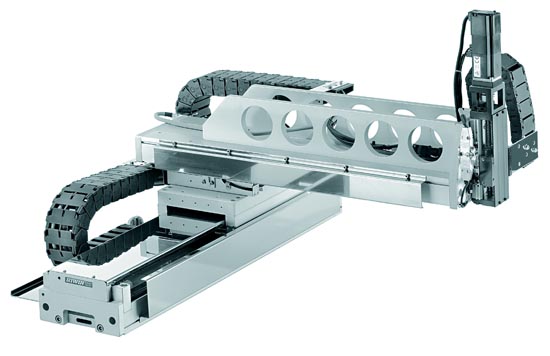
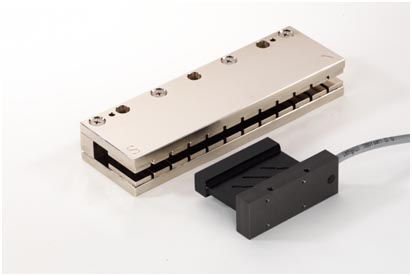
Přímá polohovácí jednotka LMS67
Nejprve se stručně podívejme na fyzikální princip a konstrukční uspořádání lineárního motoru.
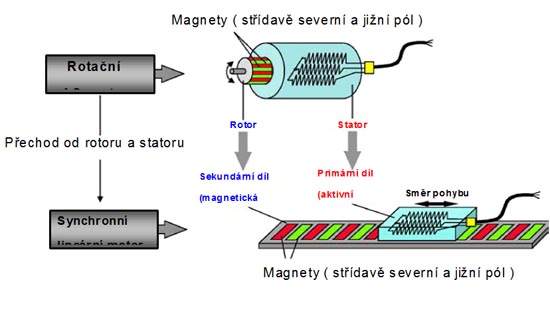
Obrázek 1. Fyzikální princip lineárního motoru
Statorem je u lineárních motorů označován primární díl a rotorem sekundární díl. Primární část je tvořena stejně jako u klasických strojů feromagnetickým svazkem složeným z elektrotechnických plechů a trojfázového vinutí uloženého v jeho drážkách. Proti primárnímu dílu je konstrukčně uspořádána sekundární část tvořená permanentními magnety, které jsou nalepené na ocelové podložce a zalité v pryskyřici. Pokud přivedeme do primární části (jezdec) řídicí proud, vznikne magnetické pole mezi oběma částmi a dojde k pohybu jezdce. Úrovní proudu můžeme ovládat rychlost a sílu pohybu. Téměř výhradně se pro řízení používají číslicové regulátory s kaskádovým uspořádáním tří zpětných vazeb, vnitřní proudové, střední rychlostní a vnější polohové. Někdy bývá i do obvodu zařazena smyčka regulace zrychlení. Sekundární díl (magnetická dráha) tvoří ve většině uspořádání delší část stroje, kterou lze podle přání zákazníka sestavovat do určitých délek. O tom, která část se má pohybovat, rozhoduje konstrukční uspořádání. V naprosté většině konstrukcí se pohybuje primární část (jezdec) po dráze tvořené libovolným počtem sekundárních dílů. Firma HIWIN v současné době vyrábí sekundární díly v segmentech o délkách 128, 192, 320 mm, které mohou být libovolně kombinovány do požadované délky (zdvihu) polohovací jednotky. Nevýhodou tohoto uspořádání je, že k pohybující se části musí být přiveden napájecí kabel, kabel snímače polohy a případně přívod chladicí kapaliny. Vše pak musí být umístěno v energetickém řetězci, který chrání kabely před poškozením a zajišťuje plynulý pohyb vodičů s jezdcem. Z hlediska konstrukce je možných několik variant motorů, synchronní, asynchronní, krokové, stejnosměrné s komutátorem a reluktanční. HIWIN vyrábí pouze jedinou, ale nejčastěji používanou variantu synchronních lineárních motorů.
U většiny strojů se nejčastěji pohyby dějí po přímce. Elektrické motory umožňují jen rotační pohyb, který je nutno převádět na pohyb lineární například pomocí kuličkového šroubu.

Obrázek 2. Srovnání lineární motor a klasický pohon
Kuličkový šroub, jakožto každý mechanický prvek, má však určitá mechanická omezení. Jednak v délce pohybu, teplu způsobeném třením a v maximálních otáčkách. Maximální otáčky jsou nejdůležitějším omezujícím faktorem, protože jsou závislé na ostatních konstrukčních parametrech řešené aplikace. Při jejich překročení dochází k nestabilnímu stavu - rozkmitání kuličkového šroubu. Vlivem toho jsme velmi tvrdě limitováni možné dosažitelnosti dynamiky pohonu. Kdežto lineární motor nemá omezení ani v délce pohybu (postaví se delší magnetická dráha) ani v jeho rychlosti (nic se netočí, tudíž nemá co vibrovat).
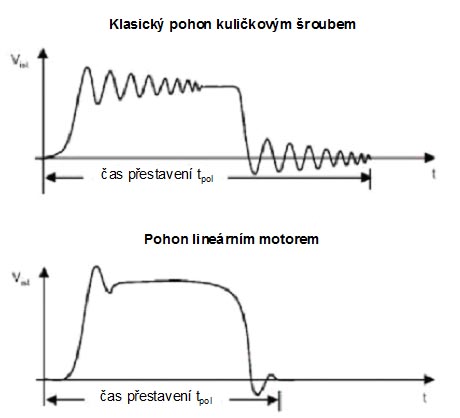
Obrázek 3. Reakce systému na změnu polohy
Obrázek 3. ukazuje reakce lineárního motoru a klasického pohonu na změnu polohy, které byly naměřeny při testovacích měřeních. Z průběhů grafické křivky je jednoznačně dáno, že pohon s lineárním motorem má výrazně kratší přechodové jevy a je schopen se rychleji dostat do ustálené polohy s minimálním překmitem. Ovšem i lineární motor má svoje nevýhody. Kuličkový šroub je sám o sobě převodem do pomala. Vyšší otáčky slabého servomotoru se transformují na vyšší tažnou sílu matice kuličkového šroubu, případně můžeme do mechanické soustavy začlenit i převodovku a tím výslednou sílu výrazně znásobit. Lineární motor si nepomůže převodem a musí celou akční sílu pohonu vykonat sám. Z toho důvodu je lineární motor nasazován hlavně v aplikacích, kde jsou menší síly, ale velmi vysoké rychlosti. Mezi přednosti lineárních motorů patří libovolně stavitelná magnetická dráha, vysoká přesnost polohy, velké dosahované rychlosti a zrychlení, jednoduché řízení. Obzvláště velkou výhodou je možnost použití více sekundárních částí (jezdců) na jedné magnetické dráze, které se pohybují nezávisle na sobě.

Obrázek 4. Lineární osa se dvěma jezdci
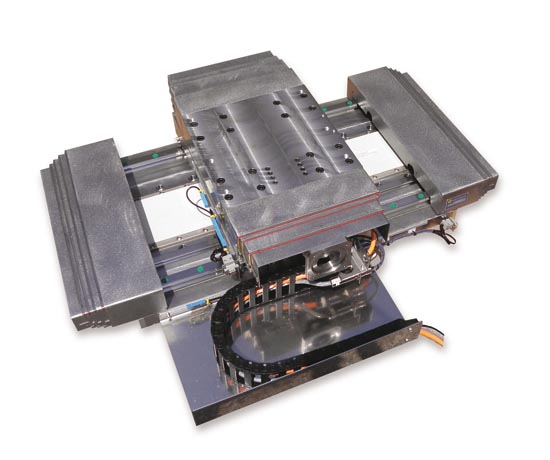
Obrázek 5. Křížový stůl pro obráběcí stroj
Nejčastější využívání lineárních motorů je v obráběcích strojích (vysokorychlostní opracovávání, laserové obrábění, svařování, přesné řezání,...), balících mechanismech, manipulační technice, měřících stanicích, atd.
Při cenové kalkulaci lineárního pohonu bychom měli do řešení zahrnout veškeré související náklady spojené s realizací konkrétního projektu, abychom dosáhli adekvátního cenového porovnání abou řešení a tím lineární motor zbytečně předčasně nevyřadíme z možného konstrukčního návrhu.
Obrazek 6: Motor LMC

Obrazek 7: Motor LMS
HIWIN s.r.o.
Kaštanová 34
620 00 Brno
tel.: +420 548 528 238
fax: +420 548 220 223
Tato emailová adresa je chráněna před spamboty, abyste ji viděli, povolte JavaScript
www.hiwin.cz
|




