Domů  1.200 osobních automobilů denně
1.200 osobních automobilů denně
1.200 osobních automobilů denně |
 |
 |
| Pátek, 28. srpen 2009 |
 V nové továrně společnosti Autoaliance International v USA vyjede z expedice uvedený počet aut, navzdory probíhající recesi v tomto průmyslovém odvětví. Ve vysoce automatizované výrobě zaujímá normalizovaná sběrnicová sít CC-Link (Control and Communikation Link) klíčovou úlohu, neboť spojuje svařovací, montážní a lakovací stanice, jakož i měniče frekvence se servomotory k řízení robotů, dopravníkových pásů, manipulátorů a jiných elektropohonů.
Zaručuje rovněž spolehlivou a rychlou výměnu dat mezi automatizačními systémy. V uvedeném společném podniku firem Ford a Mazda jsou vyráběny modely Ford Mustang a Mazda 6. V nové továrně společnosti Autoaliance International v USA vyjede z expedice uvedený počet aut, navzdory probíhající recesi v tomto průmyslovém odvětví. Ve vysoce automatizované výrobě zaujímá normalizovaná sběrnicová sít CC-Link (Control and Communikation Link) klíčovou úlohu, neboť spojuje svařovací, montážní a lakovací stanice, jakož i měniče frekvence se servomotory k řízení robotů, dopravníkových pásů, manipulátorů a jiných elektropohonů.
Zaručuje rovněž spolehlivou a rychlou výměnu dat mezi automatizačními systémy. V uvedeném společném podniku firem Ford a Mazda jsou vyráběny modely Ford Mustang a Mazda 6. Obr. 1. Každá karoserie urazí při výrobě, svařování, montáži a lakování celkem 21 km 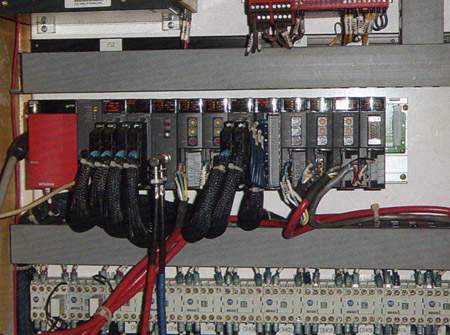 Obr. 2. Více než 120 modulárních, řídicích souprav spojuje sběrnicová sít CC-Link  Obr. 3. Rychlá a spolehlivá výměna dat přes sít CC-Link umožňuje přesně koordinovat vzájemně veškeré pohyby robotů Zdroj: 2009, Betriebstechnik, č. 6-7, str. 12 - 15: Steuern über CC-Link |
Články na podobné téma
Přehled nových článků



Naše další portály:
![]()
- „Internet věcí“ pro techniky údržby aneb Proč sdílet data z měřicích přístrojů?
- Fluke Specials jsou branou pro pravidelné výhodnější nabídky
![]()
- Prestižní RedDot za barvy a design
- Čtečky čárových kódů – žádné kompromisy, když přijde na modularitu
- LED s vyzařovacím úhlem až 270°
![]()
- Panasonic nabízí svět virtuální reality
- Jednoduchá komunikace mezi řídící jednotkou a inteligentním senzorem
![]()